|
|
|
|
 |
|
 |
|
◄ Beide
Wagenteile des O 305G "Schubgelenkbus" entsprachen komplett
dem zweiachsigen 11m-Standard-Linienomnibus O 305. Aufnahme
Sven M. Lehmann, September 1977. |
|
|
|
|
Der DAIMLER-BENZ
Schubgelenkbus |
|
Vorstellung 1977 |
|
|
Der bekannte zweiachsige
VÖV-Standard-Linienbus war bereits in mehr als 15 000
Exemplaren hergestellt worden, sodass es sich erübrigt, über
die Bewährung dieser Konzeption in der Praxis noch
irgendwelche detaillierten Ausführungen folgen zu lassen. Es
war daher naheliegend, auf der gleichen Basis auch einen
dreiachsigen Standard-Gelenkbus zu entwickeln, der trotz
seiner größeren Länge weitgehend die folgenden Bedingungen
erfüllen sollte: |
|
 |
|
→ |
Alle
im Linienverkehr eingesetzten Busse müssen einheitlich
bedient werden. |
|
→ |
Durch eine niedrige Fußbodenhöhe müssen für den Fahrgast
die gleichen Verhältnisse wie im Standard-Linienbus
geboten werden. |
|
→ |
Die
Reparatur- und Wartungsvorgänge sowie die
Ersatzteilhaltung sollen noch stärker rationalisiert und
vereinheitlicht werden. |
|
→ |
Der
neue Gelenkbus muss den gleichen Fahrkomfort wie der
zweiachsige Standard-Linienbus aufweisen. |
|
|
|
|
Die bisherigen
Gelenkbus-Konstruktionen sahen in der Regel einen
Unterflumotor vor, der zwischen den Achsen des Motor-
(Zug-) Wagens angeordnet ist und die zwillingsbereifte
Mittelachse antreibt. Dadurch ist eine relativ große
Fußbodenhöhe von maximal 900 mm mit drei Stufen
erforderlich. Zudem konnte der Mittelmotor bislang nicht
in der gleichen Weise gekapselt werden, wie es der
Heckmotor erlaubt. Bei der äußeren Gestaltung der
Karosserie und des Fahrerplatzes - insbesondere auch bei
den Front- und Seitenscheiben (Fensterteilung) - konnten
die VÖV-Richtlinien des zweiachsigen Standard-Linienbusses
sinngemäß angewandt, aber nicht vollständig verwirklicht
werden. Der Nachläufer besitzt in der Regel eine einfach
bereifte und gelenkte Achse, die genau auf der Spur und
innerhalb der Bandbreite des Zugwagens läuft. Nachteilig
wirkte sich bei dieser Konstruktion das Ausscheren des
Nachläufers aus, was bei starken Lenkwinkeln und beengten
Verkehrsverhältnissen durchaus problematische Auswirkungen
haben konnte. Auch der Federungskomfort im relativ
leichten Nachläufer konnte oft nicht befriedigen.
Teilweise heftige Vertikalbewegungen stellten viele
Fahrgäste vor eine harte Probe und schmälerten das
Komfortempfinden. |
|
 |
|
|
|
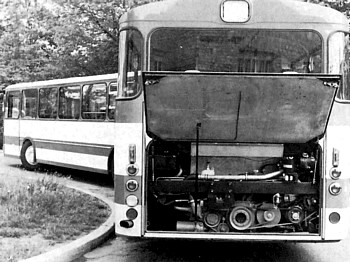
▲ Das
gesamte Triebwerk einschließlich Automatik-Getriebe
ist im Heck des Hinterwagens untergebracht, weshalb
man auch nicht mehr von einem "Nachläufer" sprechen
kann. |
|
|
|
|
|
Der neue
Schubgelenkbus |
|
|
|
Aufbauend auf den Forschungsauftrag des
Bundesministeriums für Forschung und Entwicklung (BMFT) an die
Hamburger Hochbahn AG, der zur Erstellung des Prototyps eines
Niederflur-Gelenkbusses in Schubausführung durch die
Fahrzeugwerkstätten Falkenried GmbH (FFG) in Hamburg führte,
wurde in konsequenter Anlehnung an den bestehenden und
bewährten Daimler-Benz-Standard-Linienbus O 305 der neue
Schubgelenkbus O 305G entwickelt. Da die im
Niederflur-Gelenkbus verwirklichten Ideen, wie kleinere
Raddurchmesser und niedrigerer Wagenboden erst in den 1980er
Jahren parallel zum VÖV-Bus II zu verwirklichen waren, wurde
auf das bewährte Konzept des Standardbus O 305
zurückgegriffen. |
|
|
|
→ |
Der
neue Gelenkbus bestand im Prinzip weitestgehend aus Teilen
der Serienfertigung des O 305, also aus erprobten
Aggregaten und überall vorhandenen Ersatzteilen. |
|
→ |
Bildlich gesprochen, handelte es sich um einen auseinander
geschnittenen VÖV-Standard-Linienbus, dem ein bewegliches
Mittelstück mit der Gelenkverbindung eingesetzt wurde. Das
heißt, die Vorderpartie ist serienmäßig, ebenso der
Hinterwagen, in dem am gewohnten Platz im Heck Motor und
Kraftübertragung untergebracht sind. Die zwillingbereifte
mittlere Achse war nicht angetrieben. |
|
→ |
Die
Reparatur- und Wartungsvorgänge sowie die
Ersatzteilhaltung sollten noch stärker rationalisiert und
vereinheitlicht werden. |
|
→ |
Der
neue Gelenkbus hatte , weil der Motor im Heck liegt, einen
ebenso niedrigen Wagenboden in beiden Fahrzeughälften bei
gleichen Ein- und Ausstiegsstufen wie der übliche
Stadtbus. |
|
→ |
Da
dieses Fahrzeug von hinten angetrieben (geschoben) wurde,
musste eine besondere Knickwinkel-Steuerung entwickelt und
eingebaut werden. Diese arbeitete hydraulisch bis zur
Blockierung und wurde elektronisch durch Geber an der
Lenkung und am Drehkranz gesteuert. Mit ihr wurde
erreicht, dass auch bei extremen Fahrzuständen, etwa beim
Schleudern auf vereister Fahrbahn, dass Fahrzeug nicht
weiter unkontrolliert einknicken konnte, als es dem
konstruktiv vorgegebenen Winkel zwischen Vorder- und
Hinterwagen entsprach, in Abhängigkeit vom Einschlag der
eingelenkten Vorderräder. |
|
|
|
|
|
|
|
|
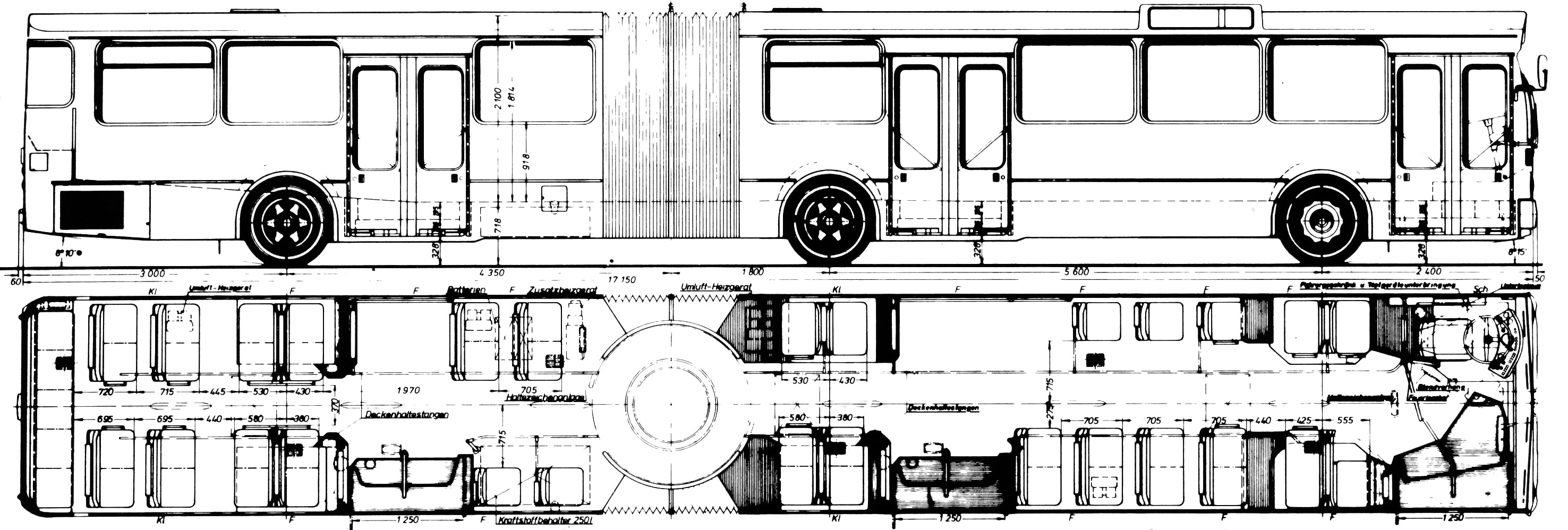
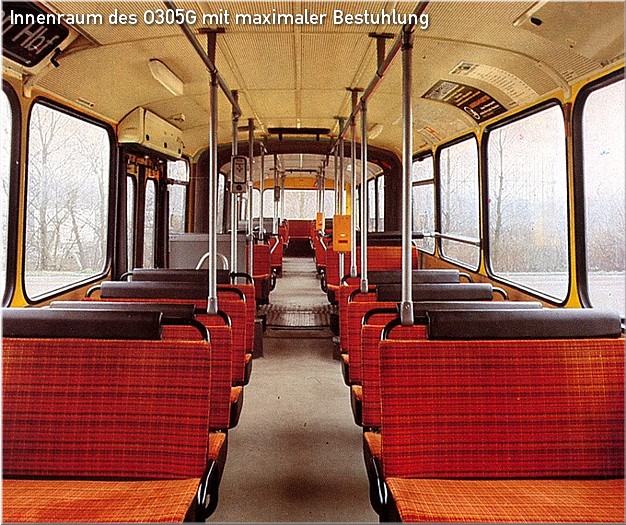
▲ Die Maße und
Innenraum-Aufteilung des O 305G mit Standardbestuhlung (anklicken für große Ansicht). |
|
|
|
Die Hamburger Hochbahn AG, bzw. ihre
Tochtergesellschaft, die Fahrzeugwerkstätten Falkenried GmbH (FFG)
in Hamburg, besaß für die eingebaute Knickwinkelsteuerung ein
Patent, an dem die Daimler-Benz AG die Baurechte erworben
hatte. Der
Prototyp des O 305G, der auf
der IAA in Frankfurt 1977 der breiten Öffentlichkeit
vorgestellt wurde, ist in den Fahrzeug-Werkstätten Falkenried
hergestellt worden. Mit Ausnahme des Gelenkbereichs, der
mittleren Laufachse (Rohrachse aus dem LKW-Bereich), der
Leitungsverlegung der Betriebsbremse, wurden sämtliche Teile
vom Standard-Linienbus O 305 übernommen, von dem zusammen mit
dem Überlandbus O 307 bis 1977 schon über 8000 Exemplare
gefertigt wurden. |
|
|
|
Als Fahrzeuglänge
wurde 17150 mm gewählt. Dieses Maß lag zwischen den
damals üblichen Längen von 16500 mm, b.z.w. 18000 mm.
Bei kürzerer Baulänge wäre der Baukasten nicht mehr
optimal zu nutzen gewesen. Während bei einer größeren
Länge die bestrichene Ringfläche im BO-Kraftkreis
ungünstiger, b.z.w. gar nicht realisierbar gewesen wäre.
In jedem Fall war der um 150 mm längere
Stülb-Vorbau
des O 307, der
von vielen Verkehrsbetrieben gewählt wurde, noch
problemlos darstellbar gewesen. Die Gesamtlänge teilte
sich auf in 9850 mm für den Vorder- und 7410 mm für den
Hinterwagen. Der Achsabstand des Vorderwagens betrug
unverändert 5600 mm wie beim zweiachsigen O 305. Ebenso
wie die Maße des vorderen und hinteren Überhangs von (2400/3000 mm) und die Innenstehhöhe von 2100 mm.
Besonders hier machte sich durch die identischen
Abmessungen die Teilegleichheit zum Standard-Linienbus
positiv bemerkbar. |
|
 |
|
|
|
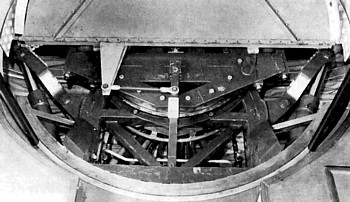
▲ Die
geöffnete Fußbodenklappe über der Gelenkverbindung
gestattet einen Blick auf die elektronisch gesteuerte
und hydraulisch arbeitende Knickwinkel-Steuerung. |
|
|
|
|
|
Auch die drei möglichen
Bestuhlungsvarianten (184 Personen bei 49 Sitzplätzen/ 171
Personen bei 58 Sitzplätzen/ 167 Personen bei 66 Sitzplätzen)
lehnten sich an die Möglichkeiten der Standardbusse an. Das
Leergewicht von 12880 kg verteilte sich auf die 1. Achse mit
3390 kg, die Mittelachse mit 3080 kg und die letzte
angetriebene Achse mit 6410 kg. Aus diesen Leergewichten
ergab sich gegenüber den konventionell über die Mittelachse
angetriebenen Gelenkbussen ein gravierender Vorteil, denn die
Adhäsionsverhältnisse an der angetriebenen Achse wurden hier
wesentlich verbessert. Die Achslastverteilung war mit 6/10/10
t gut ausgeglichen. Insbesondere die Antriebsachse war gut
belastet und die Mittelachse konnte durch ihre
Zwillingsbereifung hohe Achsdrücke aufnehmen. Die Wendekreise
lagen - je nach Kurvenwinkel - zwischen 21 und 24 m. Beim
Zurücksetzen betrug der Wendekreisdurchmesser 22,5 m. |
|
|
|
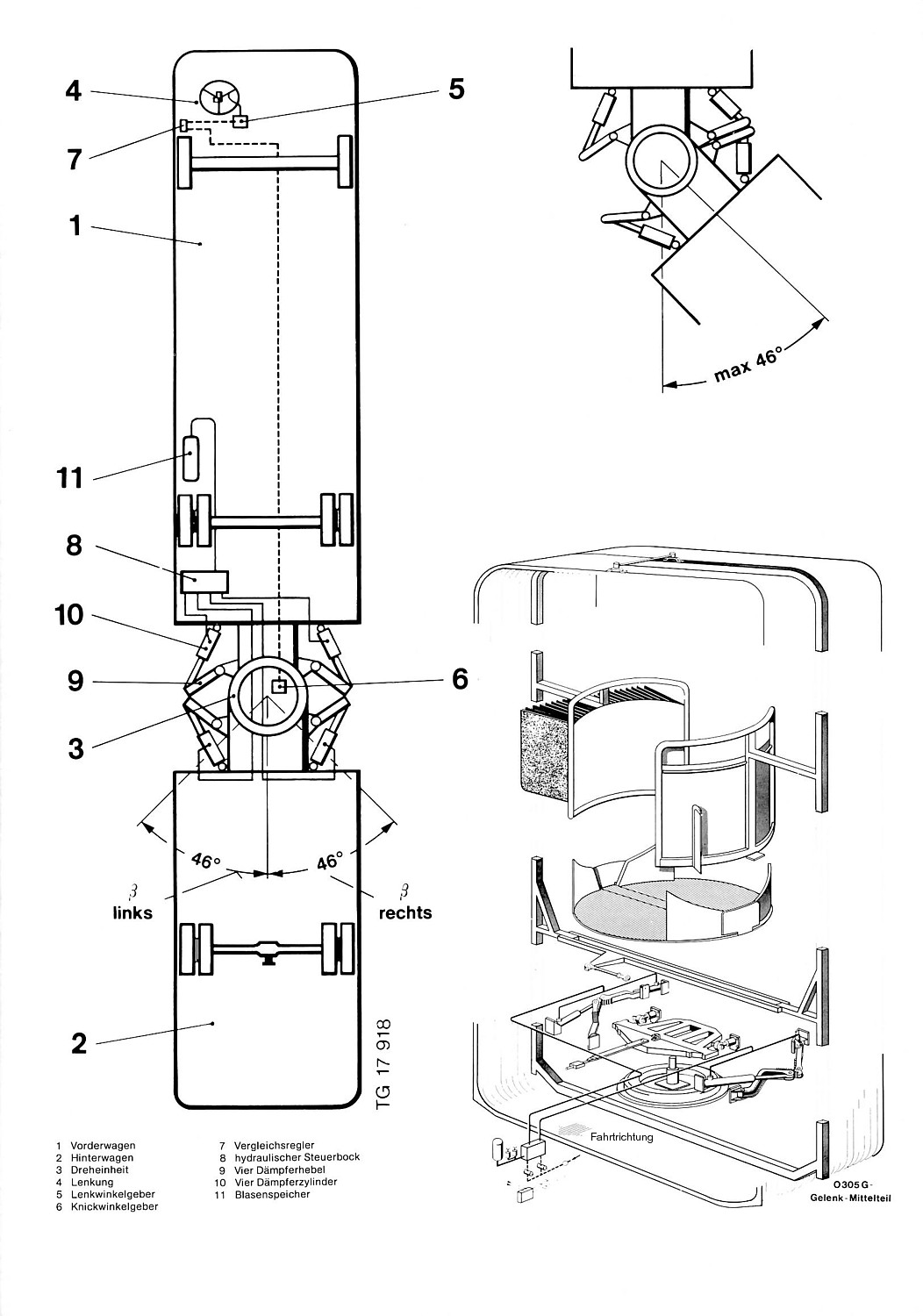
Vorder- und Hinterwagen (von einem
Nachläufer konnte man ja nicht mehr sprechen) waren über einen
Drehkranz und zwei Kugelgelenke miteinander verbunden. Am
zentralen Mittelbügel wurden beide Faltenbälge montiert, die
durch Verschlüsse leicht lösbar waren. Der Mittelbügel selbst
wurde über ein Gestänge so gesteuert, dass bei Kurvenfahrt der
halbe Knickwinkel erreicht wurde. Die Lagerung des Mittelbügel
erfolgte über ein zentrales Lager in der Drehkranzmitte, die
Abstützung dort über zwei Gleitkurven, während die Abstützung
oben über eine gelenkig gelagerte Strebe bewerkstelligt wurde.
Die Gelenkverbindung wurde über eine zweiteilige Drehscheibe,
sowie aus Sicherheitsgründen einer konventionellen
Abschrankung abgedeckt. |
|
|
|
Zur Erhöhung der Fahrstabilität,
insbesondere bei Kurvenfahrt und unter extremen Bedingungen,
wurde eine elektronisch gesteuerte
Knickwinkel-Steuerung
eingebaut, welche auf Zuordnung von Knickwinkel des Fahrzeugs
zum Lenkwinkel an den Vorderrädern ansprach. Die Anlage
bestand aus folgenden wesentlichen Elementen: |
|
|
| 1. |
Hydraulikzylinder und Stützarmpaare links und rechts vom
Drehkranz angeordnet. |
| 2. |
Hydraulischer Steuerblock |
| 3. |
Vergleichsregler, welcher Lenkwinkel zu Knickwinkel
verglich. |
| 4. |
Speicher, normaler Betriebsdruck von 7 bar. |
| 5. |
Pneumatische Vorsteuerventile. |
|
|
|
|
Bei normaler Fahrt wurde der Vorder-
gegenüber dem Hinterwagen über den im Hydraulikzylinder
vorhandenen Betriebsdruck gegenseitig abgestützt. Diese
hydraulische Dämpfung ist in einem Bereich bis etwa 8°
Lenkeinschlag frei wirksam gewesen. Diese normale Abstützung
wirkte sich günstig auf den Fahrkomfort aus und verhinderte
gefährliche Schlingerbewegungen. Erst bei großem Lenkeinschlag
und einer dann mehr als 1° zusätzlichen Winkeländerung
zwischen Lenkwinkel und Knickwinkel trat das Prinzip der
Steuerung/Blockierung in Kraft. Damit ist die zweite
wichtigste Aufgabe der Knicksteuerung angedeutet. Sie sperrte
die Einknickung, wenn der dem Lenkwinkel zugeordnete
Knickwinkel überschritten wurde und verhinderte somit ein
Ausbrechen des Fahrzeugs bei schlechten
Adhäsionsverhältnissen. Über Jahre konnte kein anderer
Hersteller aufgrund des Patentschutzes ein vergleichbares
System anbieten, was dem O 305G mit Aufnahme der
Serienproduktion im Jahre 1978 einen immensen
Wettbewerbs-Vorteil verschaffte und technisch halbgare
Konstruktionen hervorbrachte, wie etwa die zwar mit Heckmotor
ausgerüsteten
MAN- und
Magirus-Gelenkbusse, die aber die
Motorleistung weiterhin über eine vielfach gelagerte und
störanfällige Kardanwelle durch den Drehkranz des Gelenks auf die Mittelachse übertrugen. Erst
Vetter konnte nach einem
Irrweg nach
1980 ein ähnliches, aber
technisch einfacheres System anbieten, welches die
Schutzrechte des FFG-Patents nicht verletzte. Nennenswerte
Stückzahlen kamen aber nicht zustande, da durch
Zahlungsschwierigkeiten die Omnibusproduktion im Jahre 1983
weitgehend eingestellt wurde. |
|
|
 |
|
|
|
▲ An
allen drei Türöffnungen waren die gleichen niedrigen
Einstiegsverhältnisse vorhanden, welche schon aus dem O 305 bekannt
waren. Lediglich an der linken Seite der letzten Tür stieg der
Innenboden um 4° an (anklicken für große Ansicht).
Hier die
Ansicht mit geschlossenen Türen. |
|
|
|
|
|
 |
|
|
|
▲ Auch die türlose Ansicht zeigt
die völlige Baugleichheit mit dem zweiachsigen O 305. Gut
erkennbar ist der Unterschied zwischen der mittleren Rohrachse
und der in Außenplanetenbauweise ausgeführten Antriebsachse (anklicken für große Ansicht). |
|
|
|
|
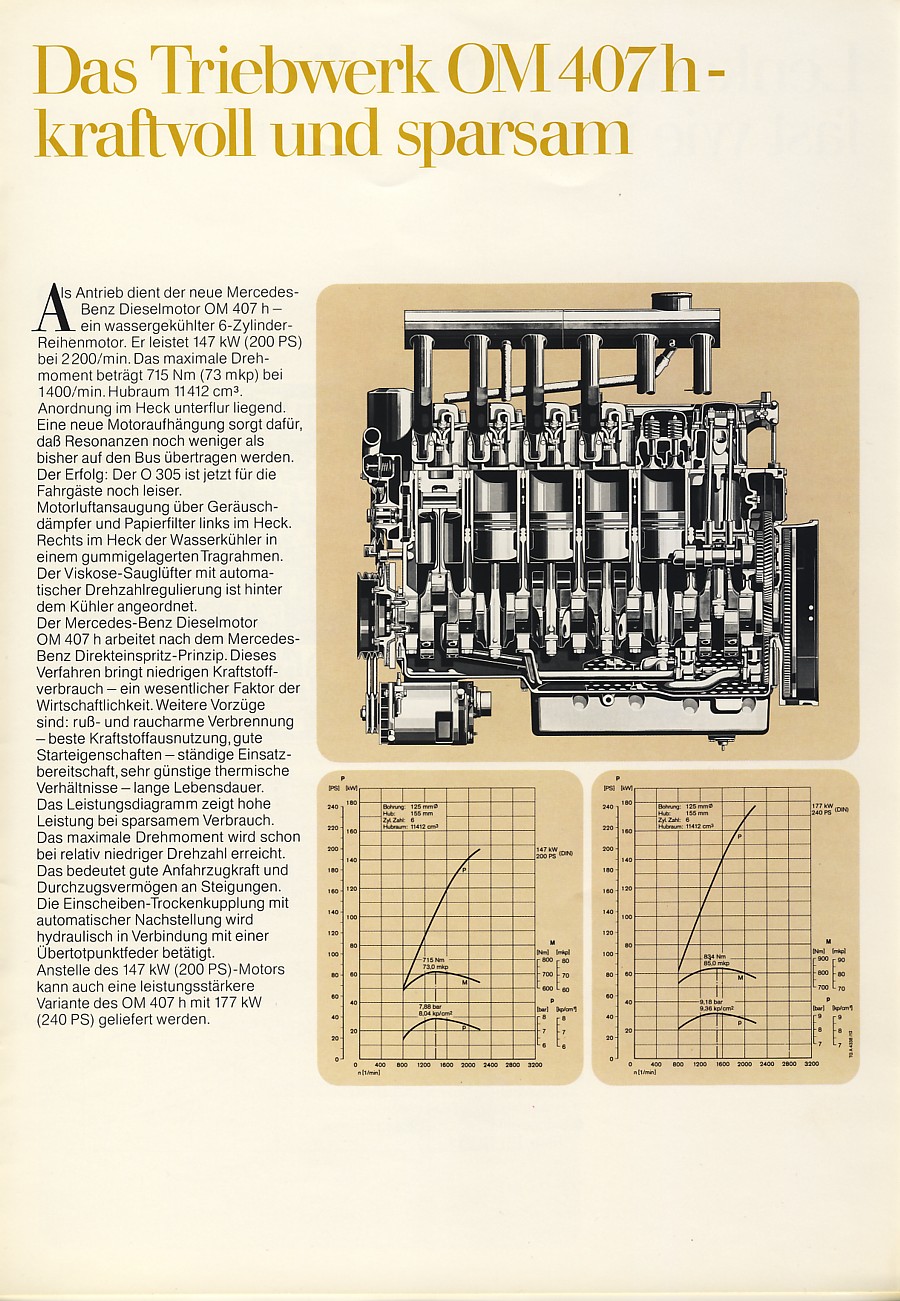
Als Triebwerk war im Fahrzeugheck der
OM
407h eingebaut, ein wassergekühlter Direkteinspritzer mit
einer Nennleistung von 177 kW (240 PS) bei 2200 U/min und
einem maximalen Drehmoment von 834 NM bei 1500 U/min. Der
Motorraum war zum Fahrgastraum über eine Trennwand ausreichend
gegen Wärme und Motorgeräusche isoliert und geschützt. Zur
Kraftübertragung stand das Dreigang-Automatikgetriebe W3D
080/R mit hydrodynamischem Wandler zur Verfügung. Als
Sonderausstattung war auch ein automatisches Getriebe mit vier
Fahrstufen erhältlich. Für topografisch anspruchsvollere Einsatzgebiete
wurde später eine aufgeladene Variante mit 280 PS, welche aus
dem OM 407h zum OM 407hA weiterentwickelt wurde, nachgereicht. Für ihn wurde das
Automatikgetriebe W4A 110/R bereitgestellt und mit einem integrierten Retarder versehen.
Manuelle Schaltgetriebe waren nicht vorgesehen. |
|
|
|
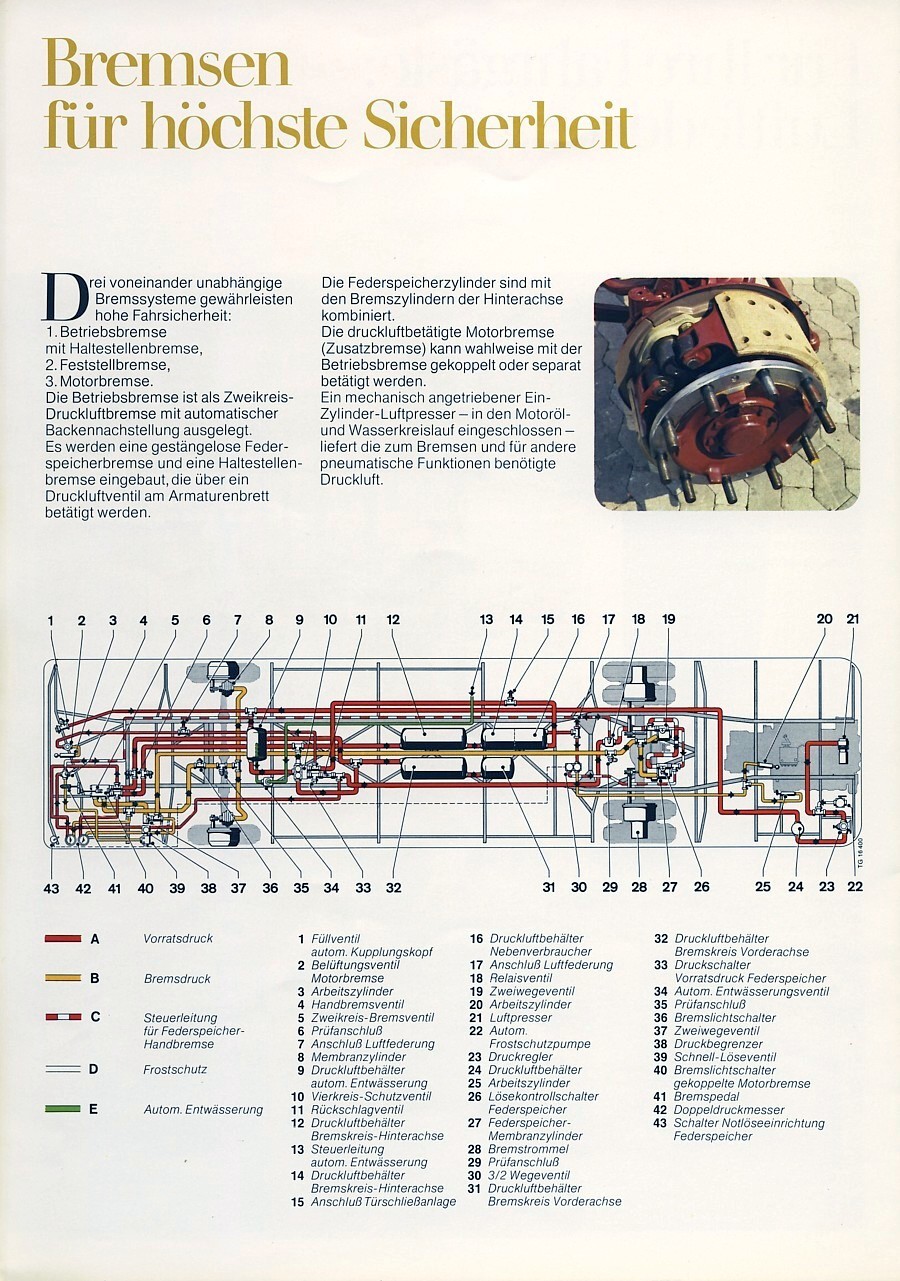
Die serienmäßige Servolenkung mit
Lenkungsdämpfer und mechanisch angetriebener Hydraulikpumpe
wurde ohne Änderung aus dem O 305 übernommen. Die
Zweikreis-Druckluftbremse besaß eine automatische Nachstellung
und wirkte auf die Mittel- und Antriebsachse lastabhängig.
Federspeicher-Feststellbremse und druckluftbetätigte
Motorbremse, kombiniert mit Betriebs- und Haltestellenbremse,
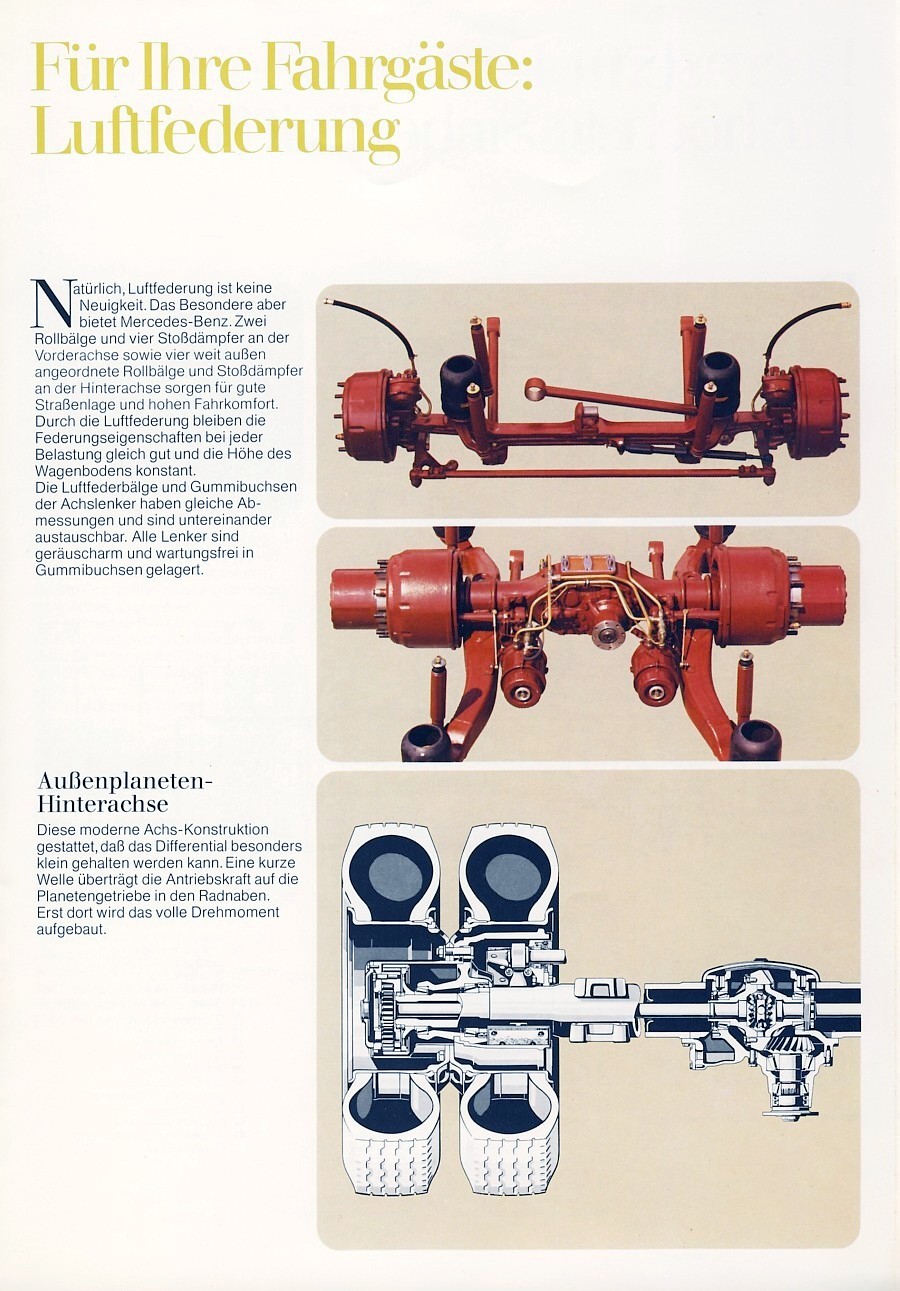
waren ebenfalls aus dem O 305 bekannt. Die Starrachsen, an der
Antriebsachse mit Außenplanetenübersetzung, hatten die aus dem
O 305 bekannte
Luftfederung (zwei Rollbälge vorne, je vier
Rollbälge in der Mitte und hinten) und je vier Stoßdämpfer,
vorn drei Längs- und ein Querlenker, Mitte und hinten je zwei
Längs- und ein Querlenker. |
|
|
|
Zusammenfassend kann man sagen, dass der
O 305G ein Vorreiter einer neuen Fahrzeuggeneration mit
richtungweisender Technik war, an der in Zukunft kein anderer
Hersteller auf Dauer vorbei kam. Alle verbliebenen Mitbewerber
hatten früher oder später diese Technik auch in ihre Produkte
eingebaut, sodass ab Mitte der 1980er Jahre praktisch nichts
anderes mehr angeboten wurde und der Siegeszug der
Schubgelenkbus-Technik vollzogen war. |
|
|
|
|
Seite wurde erstellt im November 2012 |
| ©
BEKU-BILDARCHIV 03/2008 |
|
|



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}